
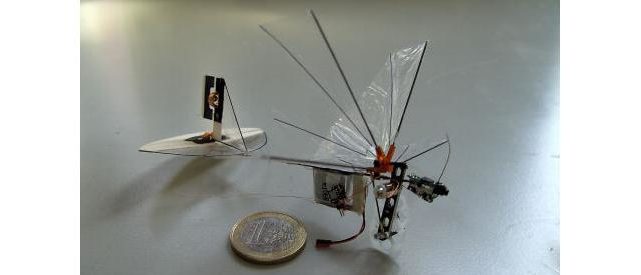




The DelFly Explorer is the first flapping wing MAV that can perform autonomous flight. It carries a stereo vision system with processing onboard which is used to avoid obstacles. It is also equipped with a barometer to maintain its height. This combination of sensors enables the 20 grams DelFly Explorer to perform a take-off, to ascend to a chosen height and to fly around for up to 9 minutes without the need of external control. Successful tests have been peformed in different indoor spaces such as our lab as well as lecture rooms. The current record of 9 minutes is restricted by the battery.

DelFly Explorer in flight
The most essential part of the DelFly Explorer is its vision sensor: a stereo vision camera in combination with sufficient processing for obstacle detection with a weight of 4 grams. An efficient stereo vision algorithm has been implemented in combination with other vision based methods to cope with areas that lack visual texture. In combination with a control algorithm that performs short term path planning, the vision system is able to guide the DelFly Explorer along an obstacle free trajectory.
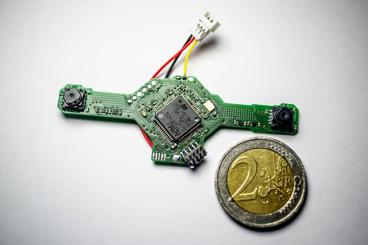
The 4-gram stereo vision system
The weight of older designs of DelFly II was 16 grams. Adding a camera system of 4 grams was therefore not straightforward. The flight time was reduced significantly to only a few minutes, and the minimal forward speed was not sufficiently low for indoor flight in small spaces. By redesigning the airframe and the motor the structural weight has been reduced while the lift capacity has been increased significantly. Also the design of tail surfaces has been changed to increase the pitch and yaw stability, while having better and more independent control authority on the rolling motion. Except for a motor controller and an RC link, the autopilot system onboard the DelFly Explorer also features a barometer for height control, and gyroscopes for pitch stabilization and heading control. In the future the gyroscopes will be used in combination with the accellerometers and magnetometers for attitude determination.
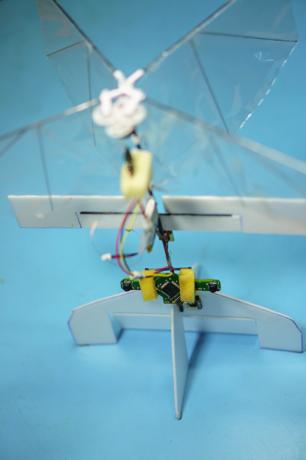
Close up of the new design features of the DelFly Explorer
The DelFly Explorer is currently capable of performing collision free flight. Follow up research will focus on full autonomous navigation, which should enable the MAV to explore not only individual rooms, but also to fly from one room to the other.
For high resolution images, please contact microuav@gmail.com
Reference:
“Autonomous Flight of a 20-gram Flapping Wing MAV with a 4-gram Onboard Stereo Vision System”, by C. De Wagter, S. Tijmons, B.D.W. Remes, and G.C.H.E. de Croon, (ICRA 2014). (pdf)